|
Modelo
|
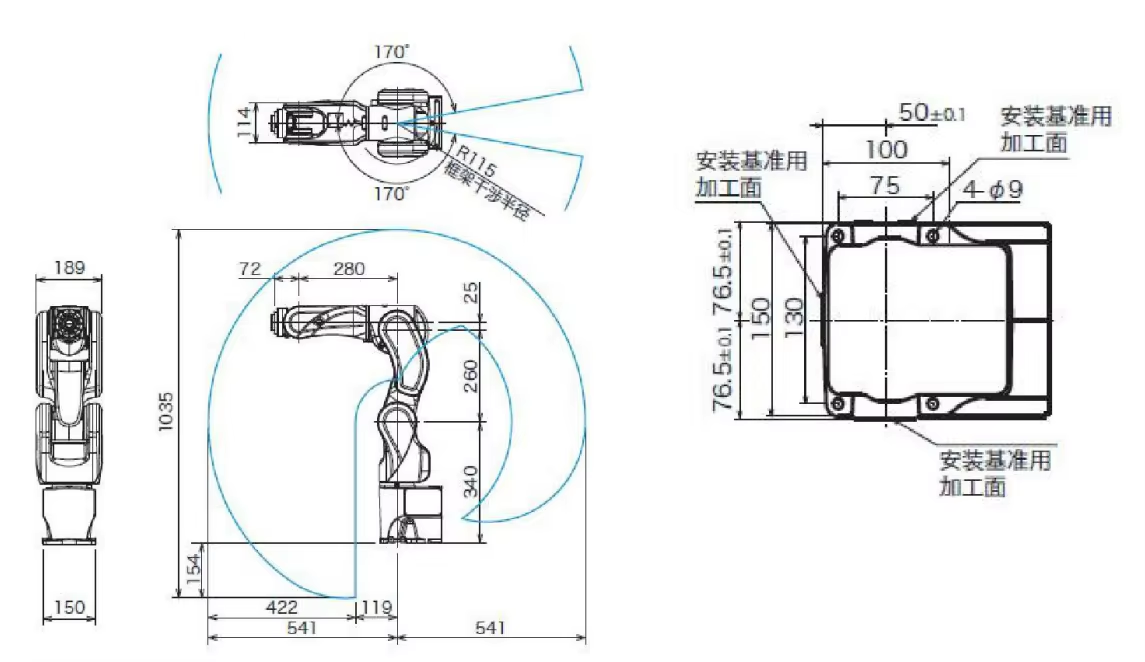
602
|
|
Carga útil
|
2kg
|
|
Radio de trabajo máximo
|
540mm
|
|
DOF (en inglés)
|
6
|
|
Velocidad de las articulaciones
|
J1
|
370°/s
|
|
J2
|
370°/s
|
|
J3
|
430°/s
|
|
J4
|
300°/s
|
|
J5
|
460°/s
|
|
J6
|
600°/s
|
|
Gama conjunta
|
J1
|
±170°
|
|
J2
|
±110°
|
|
J3
|
“+40°/- 220°
|
|
J4
|
±185°
|
|
J5
|
±125°
|
|
J6
|
±360°
|
|
Par máximo permitido en un instante
|
J5
|
35Nm
|
|
J6
|
24Nm
|
|
Peso
|
28kg
|
|
Precisión de posicionamiento repetida
|
±0,05 mm
|
|
Temperatura de funcionamiento
|
0-40° C
|
Robot ligero, pequeño en forma y ligero en peso lo hace adecuado para el montaje, small unit robots which can complete all kinds of work such as carga/descarga/clasificación/montaje at high speed and high precision. Al mismo tiempo, todos los cables del robot están integrados y se pueden operar de manera flexible en un espacio pequeño. El modo de instalación se puede instalar en el suelo, montado o invertido.
Carga nominal de muñeca: 2Kg. Radio de trabajo máximo: 540mm.

Funciones:
- Peso ligero
- Velocidad de funcionamiento rápida
- Hermoso
- Alta precisión de posicionamiento repetido
- Cable incorporado
Aplicación:
Manipulación de materiales:
- 1. Mayor flexibilidad. more stable performance and lower energy consumption;
- 2. Máximo rendimiento con alta velocidad;
- 3. Tiempo de trabajo y funcionamiento prolongado;
- 4. Ahorre espacio en el suelo;
Ensamblaje:
- 1. Alta velocidad y alta precisión de posicionamiento repetible;
- 2. Ahorro de espacio en el suelo;
- 3. Tiempo de trabajo y funcionamiento prolongado;
- Pulido:
- 1. Alto nivel de protección;
- 2. Alto par de torsión en la muñeca.